C_ALL: Cognitive Assistance with LIDAR Localization
ProfessionalC_ALL: Cognitive Assistance with LIDAR Localization
Project Overview
C_ALL is an innovative assistive technology system designed to help visually impaired individuals navigate indoor environments safely and independently. The system combines LIDAR-based localization with cognitive assistance to provide real-time guidance, obstacle detection, and spatial awareness to users. My team and I had the amazing opportunity to present this project to the Board of Trustees at Stevens Institute of Technology, an honor reserved to a few. We also had the opportunity to present our project as finalists for the Ansary Entrepreneurship Competetion.
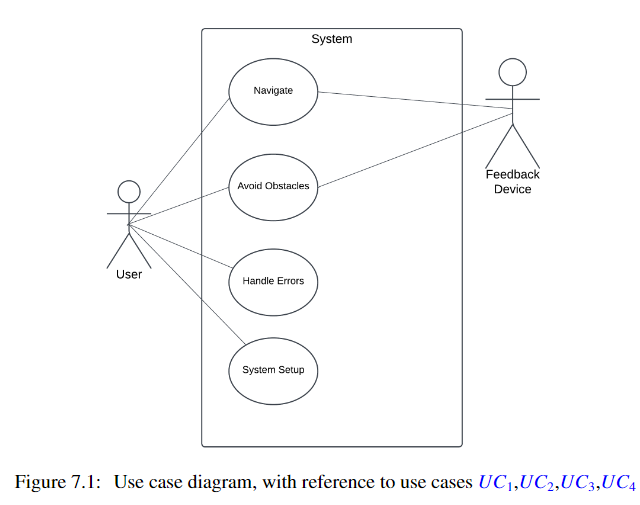
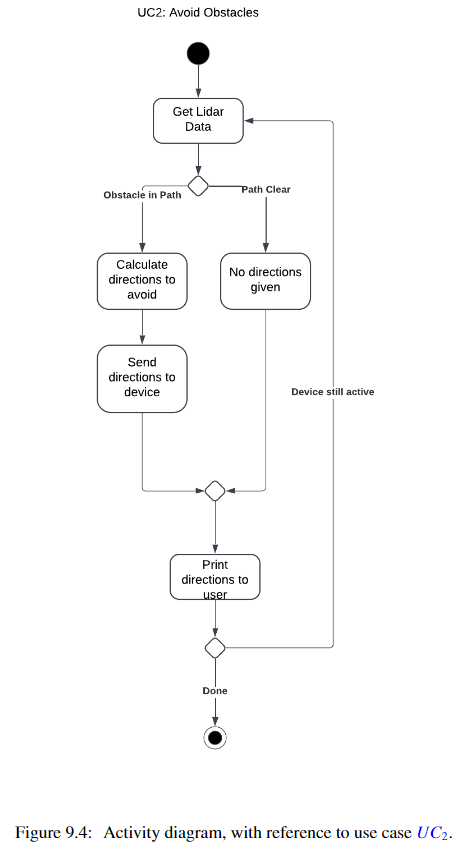
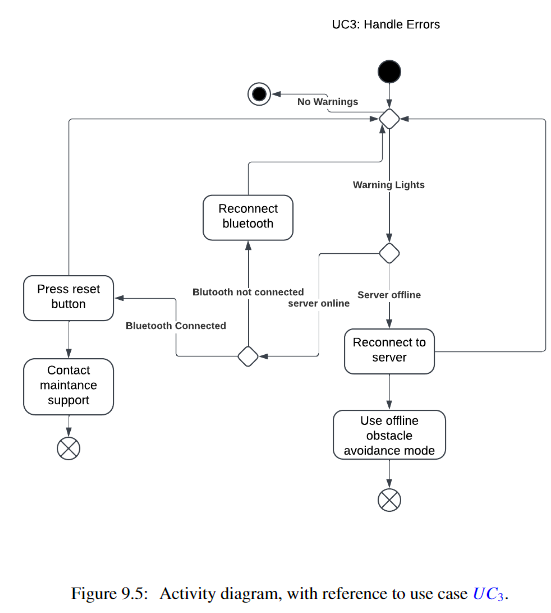
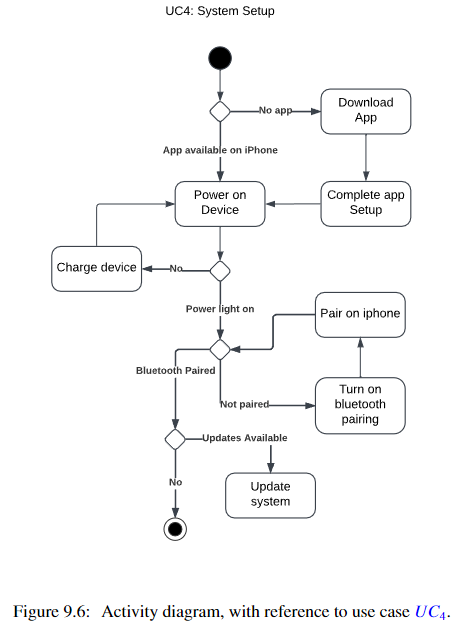
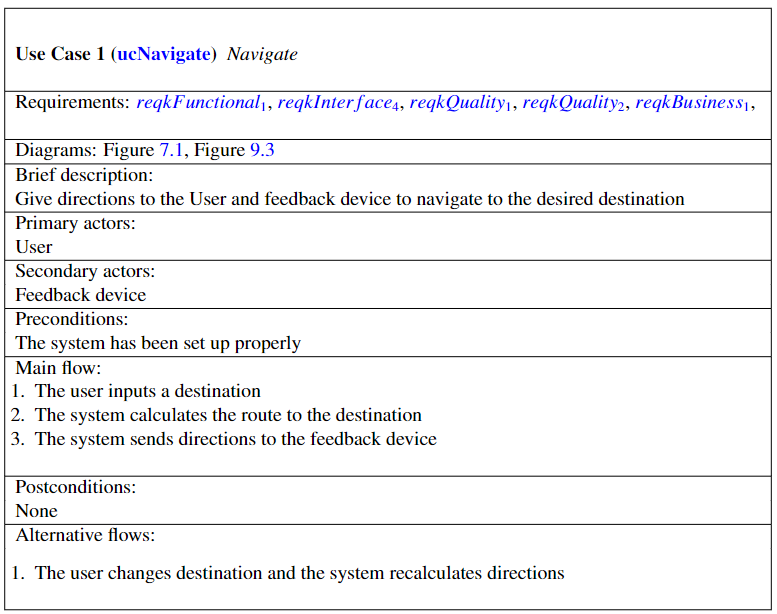
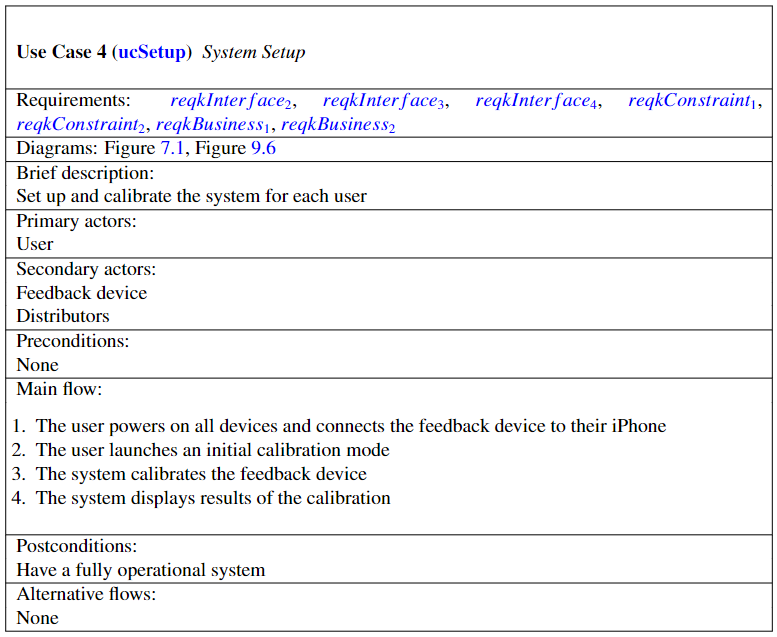
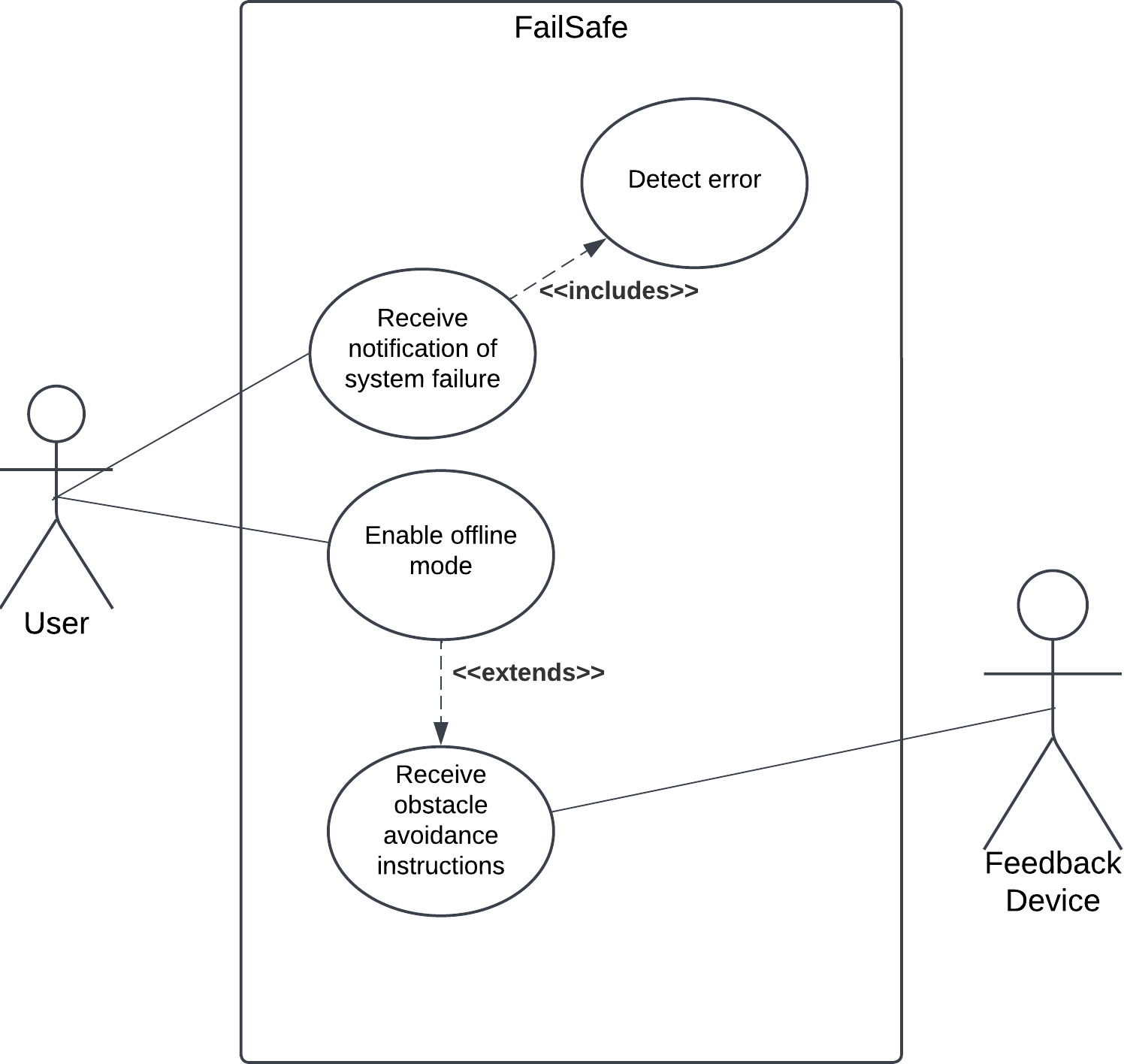
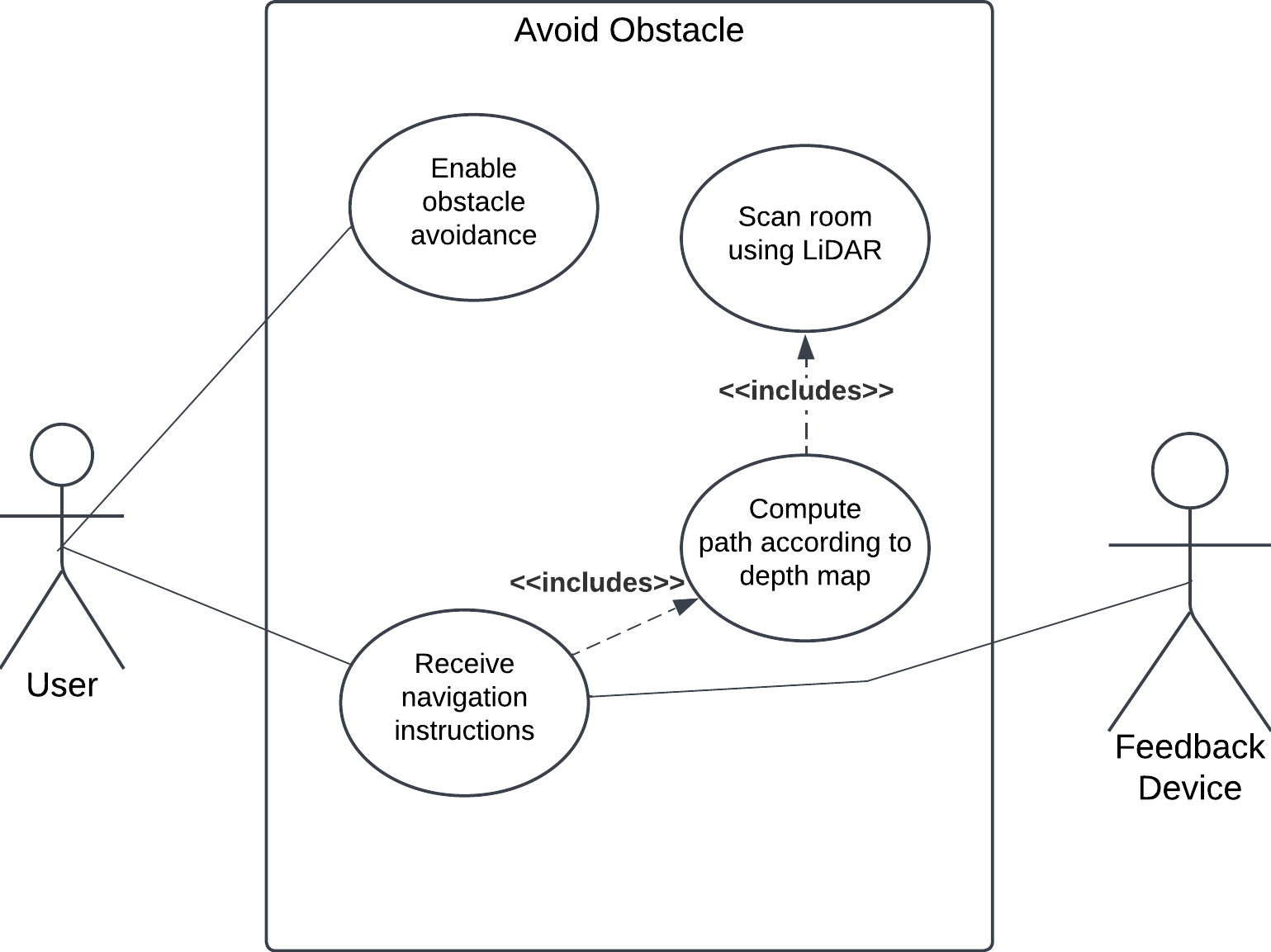
Overview of the C_ALL system represented with comprehensive Actvity Diagrams.
This is the Testing View, the User will instead use two physical rotaters on two gloves that will direct the user. One glove will direct the User towards the target (Navigation), whilst the other will alert the User of obstacles (Avoidance) and guide him/her around it.
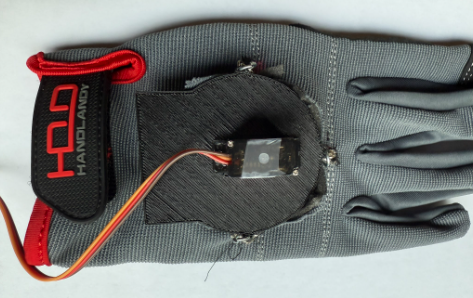
Glove Prototype
Shown is the calibration procedure for the pointers, ensuring they always start on true forwards. This is done by utilizing two limit switches, and measuring the time taken to reach each limit switch and rotating the pointer to the center.
Core Features
LIDAR-Based Localization
- High-precision indoor positioning
- Real-time environment mapping
- Dynamic obstacle detection
- Path planning and navigation
- 3D spatial awareness
LIDAR Mapping
Cognitive Assistance
- Contextual environment descriptions
- Obstacle proximity alerts
- Safe path recommendations
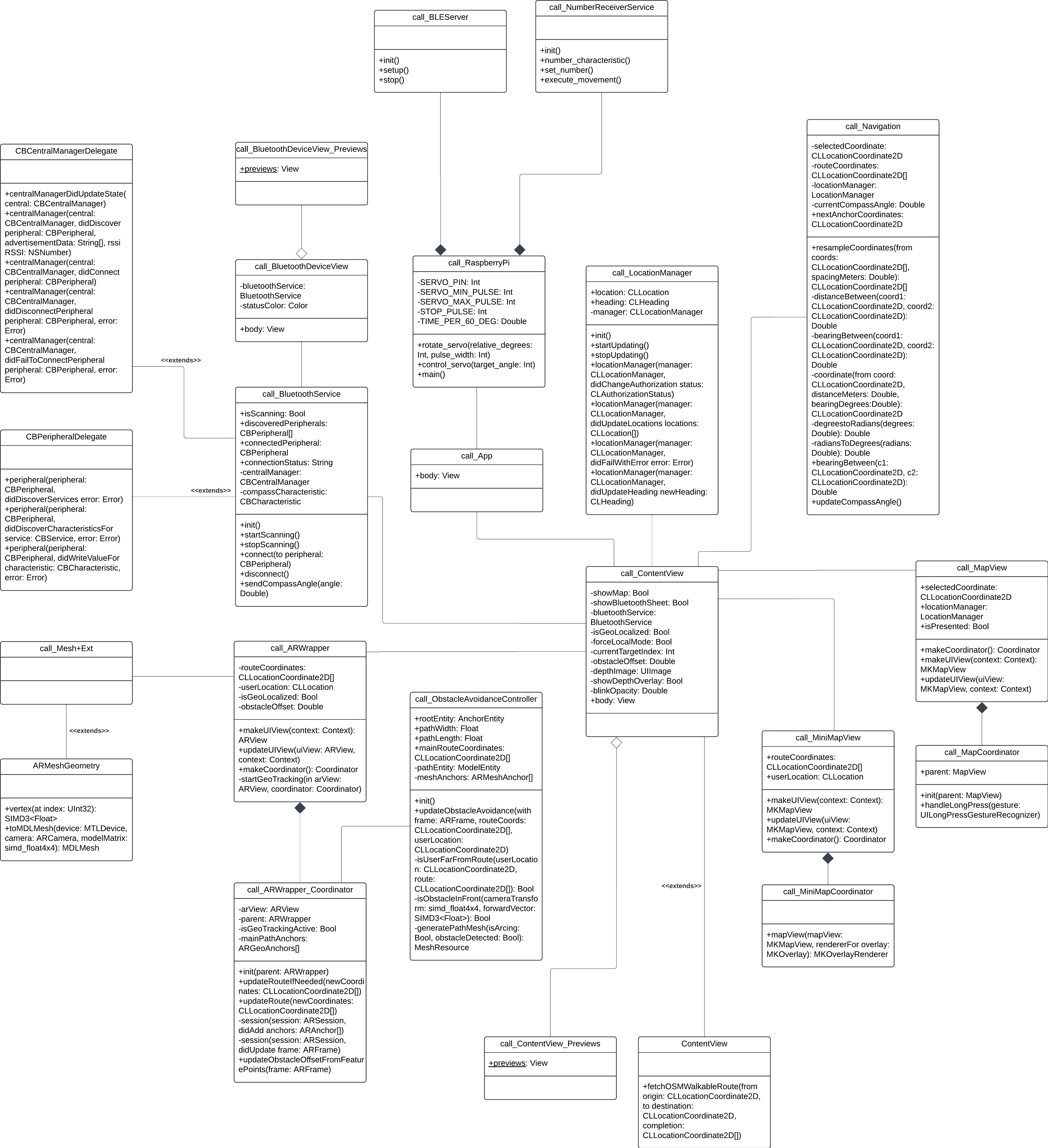
Class Diagram showcasing all cognitive assistance features and navigation guidance.
Technical Implementation
Sensor Integration
- LIDAR sensor array configuration
- Sensor fusion algorithms
- Real-time data processing
- Environmental mapping
- Position tracking
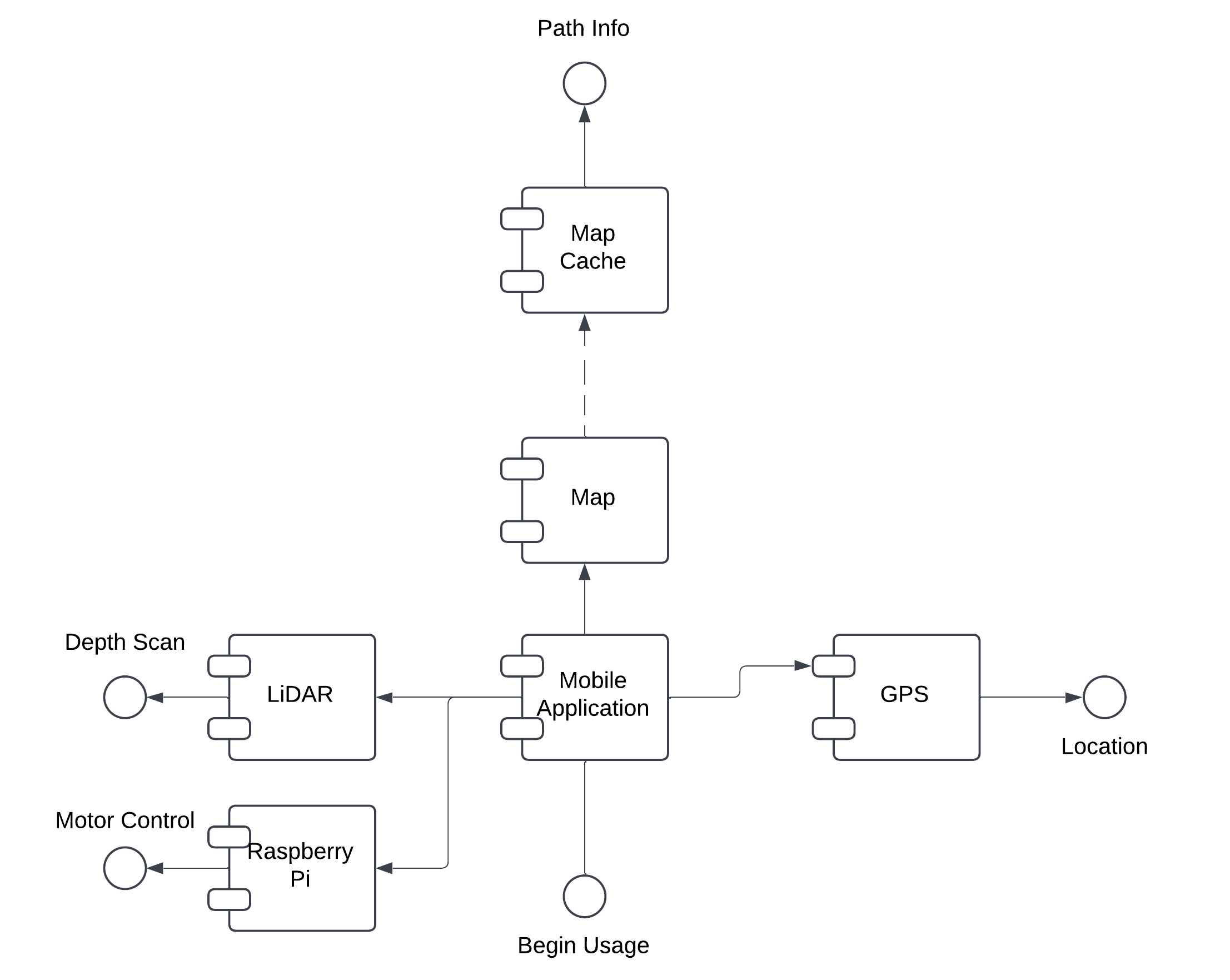
Component Diagram showing overview of the data flow.
Navigation System
- Path planning algorithms
- Obstacle avoidance
- Dynamic route adjustment
- User position tracking
- Safety protocol implementation
Navigation System
User Interface
User Interaction
- Context-aware commands
- Real-time feedback
- Emergency protocols
- User customization options
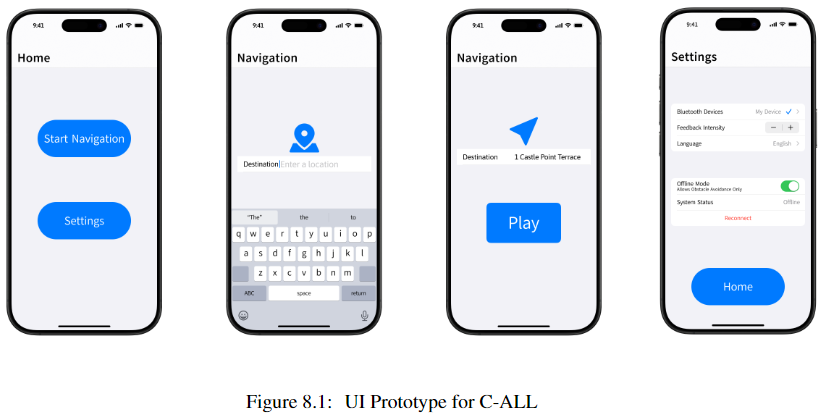
UI Interface
Safety Features
- Collision prevention
- Emergency stop protocols
- Battery monitoring
- System health checks
- Backup navigation modes
Safety Systems
Safety Systems
Future Developments
Planned enhancements include:
- AI Siri Integration once developer tools are available
- Enhanced object recognition
- Improved battery efficiency
- Expanded environment mapping
- Multi-user support
- Cloud-based data processing
- Integration with smart building systems
Project Repository
You can find the full project on GitHub.
Project Gallery